Montaggio dei componenti sul circuito stampato. Si può
usare anche una millefori, seguendo la quadrettatura a passo
2,54 mm. Qui c'è il file
pdf del disegno. |
|
|
|
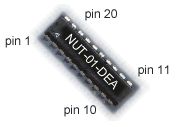
LEGENDA
COLLEGAMENTI:
| P2 |
Da collegare al P2 del Basic Stamp, è
il piedino in cui fare le SEROUT. Da collegare sempre, |
| P3 |
Da collegare al P2 del Basic Stamp, è
il piedino in cui fare le SERIN |
| Rem |
Ingresso del segnale del telecomando,
da collegare all'uscita del ricevitore infrarossi oppure
del ricevitore radio. |
| Vss |
Polo negativo dell'alimentazione a 5 volt,
da collegare sempre. |
| I1, I2, I3, I4 |
Ingressi del Nutchip. Si possono collegare
a dei sensori, interruttori, oppure a dei pin del Basic
Stamp programmati com USCITE. |
| Aref |
Tensione di riferimento del comparatore.
Va collegato ad una tensione compresa fra 0 e 5 volt, oppure
lasciato libero se non usato. |
| O1, O2, O3, O4 |
Uscite del Nutchip. Si possono collegare
a dei LED (con resistenza in serie), alla base di transistors
(con resistenza in serie) , oppure a dei pin del Basic Stamp
programmati come INGRESSI. |
| Vdd |
Polo positivo dell'alimentazione a 5 volt,
da collegare sempre. |
|
|