|
|
|
|
|
|
|
|
|
|
DEFINIZIONE. v = R * w [m / s]
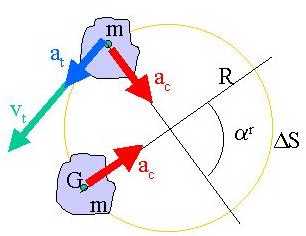
La velocità è sempre lungo la tangente(d) alla traiettoria. Per ricordarlo si usa porre una t come pedice di v:
vt = R * w [m / s]
Il moto può avere velocità costante (moto rotatorio uniforme) o variabile in qualunque modo. In entrambi i casi il moto rotatorio è dotato di accelerazione. 1) modulo: ac = v2 / R; 2) verso: verso il centro della curva; 3) direzione: il raggio sul quale si trova il baricentro G della massa m.
L'accelerazione centripeta ac è sempre diretta sul raggio verso il centro.
Fc = - m * ac = - m * v2 / R = - m * w2 * R.
Il segno - non vuol dire che Fc è negativa, ma significa solo che essa ha il verso opposto ad ac. La forza Fc è quella che fa muovere verso l'esterno della curva i pupazzetti appesi allo specchietto retrovisivo nelle automobili.
Si chiama moto rotatorio quello di una massa il cui baricentro descrive una traiettoria curva di raggio nullo o non infinito(a).
Fra i moti rotatori se ne possono distinguere due un poco particolari: quello con traiettoria circolare e quello intorno allo stesso baricentro (rotazione su se stesso).
VELOCITA'.
La definizione analitica di velocità è ancora: rapporto fra lo spazio percorso e il tempo impiegato a percorrerlo, cioè: v = D S / D t, essendo D (delta) il simbolo di "intervallo".
Cambia invece l'espressione analitica che lega le variabili. Infatti un arco di curva, noto il raggio R, ha la lunghezza espressa da: D S = R * a, essendo a l'angolo compreso fra i raggi passanti nei due estremi di D S. Poichè l'unità di misura (per esempio m / s) deve essere la stessa che nel moto rettilineo, l'angolo deve essere espresso in radianti, che è adimensionale(b) e quindi si usa scrivere una "r" come esponente di a. Tale "r" ha il significato di "angolo espresso in radianti".
L'espressione diventa: v = R * a r / Dt.
Può sembrare strano che una lunghezza (quella dell'arco di circonferenza) si possa trovare come prodotto di una lunghezza (il raggio) per un angolo a r. Per capirlo basta ricordare che la circonferenza è c = 2p*r; mezza circonferenza è c/2 = p*r; un quarto di circonferenza è c/4 = (p/2)*r e così via: le porzioni di circonferenza, e quindi qualunque arco, è dato dal prodotto fra una frazione di p, cioè un angolo in radianti, e il raggio.
Si è soliti chiamare il rapporto ar / Dt con il nome di velocità angolare (velocità con la quale il raggio "percorre" l'angolo a), anche se in verità questo rapporto è una frequenza(c). Detta w la velocità angolare, infine si scrive:
ACCELERAZIONE.
La definizione analitica di accelerazione è ancora: rapporto fra la variazione di velocità e il tempo durante il quale tale variazione si verifica, cioè a = D v / D t.
La velocità è però un vettore e quindi si possono avere tre tipi di variazione: 1) di modulo; 2) di verso; 3) di direzione.
1) variazione di modulo: si ottiene una accelerazione del tutto simile a quella dei moti rettilinei e si definiscono moti accelerati o decelerati a seconda che la velocità cresca o diminuisca; la si indica con at per ricordare che sta sulla tangente.
2) variazione di verso: come in un pendolo, la massa giunge in un punto e poi "torna indietro"; anche l'accelerazione tangenziale cambia verso, diventando positiva o negativa.
3) variazione di direzione: è una cosa nuova rispetto al moto rettilineo, perchè questa accelerazione è sempre presente! Se la massa non cambiasse continuamente direzione(e) non potrebbe seguire la traiettoria curva. Da ciò segue che, se pure il moto è uniforme (sempre nello stesso verso e sempre con lo stesso valore), tuttavia c'è sempre una accelerazione, che prende il nome di "centripeta"(f) perchè è sempre diretta verso il centro della curva.
L'accelerazione è un vettore e quindi:
ATTENZIONE: poichè abbiamo una massa (quella che ruota) e una accelerazione (quella centripeta, sempre presente), per la legge della dinamica che dice F = m*a, deve esserci sempre, nel moto curvilineo una forza. Tale forza è detta centrifuga, poichè è nel verso opposto a quello dell'accelerazione. Il suo valore è
(a) In realtà anche le rette possono essere definite curve, ma con raggio infinito, mentre i punti sono curve di raggio zero.
(b) Adimensionale significa che è un numero puro, senza alcuna unità di misura, essendo il rapporto fra la lunghezza di un arco di circonferenza e il raggio della stessa. Ricordando che la circonferenza è lunga 2 * p * r, dividendo per il raggio si ottiene 2 * p. Ma, percorrendo l'intera circonferenza si compie un giro completo, cioè si "copre" un angolo giro. Da ciò segue che un angolo di 360° si può esprimere in radianti col numero 2 * p. Si può anche dire che, poichè il raggio sta nella circonferenza 2 * p volte "coprendo" 360°, così 180° vale un solo p e un angolo di 90° vale p / 2, ecc.
(c) La frequenza di un fenomeno è il numero di volte che quel fenomeno si verifica nell'unità di tempo e si misura in Hz (Hertz), il quale a sua volta non è altro che l'inverso di un tempo (1 / s). Così ad esempio l'energia elettrica nelle nostre case è fornita a "50 Hz", cioè cambia segno (positiva / negativa) 50 volte al secondo.
(d) Le curve possono essere pensate come una infinita succesione di segmenti infinitamente piccoli oppure come un poligono di infiniti lati. Perciò la massa percorre sempre e solo segmenti rettilinei, anche se infinitamente piccoli. Tali segmenti sono poi gli stessi che la curva ha in comune con la retta tangente, la quale viene a coincidere punto per punto con la traiettoria. Per questo motivo, sbagliando la curva, le automobili escono fuori strada "per la tangente", cioè proseguono il loro moto seguendo una retta.
(e) La "direzione" è per definizione la retta sulla quale giace il vettore. Nelle curve la direzione punto per punto è data dalla tangente e quindi è diversa punto per punto.
(f) In latino "petere" significa desiderare e quindi centripeta vuol dire "che desidera il centro".