![]()
![]()
![]()
Macchine a cinematica parallela e seriale
Le macchine utensili comunemente denominate "Robot" possono essere classificate secondo diversi criteri. E' usuale fare riferimento ad un certo tipo di Robot indicando il numero di gradi di libertà (in gergo tecnico anche denominati "assi") che ne caratterizza le possibilità di movimento. A seconda del numero, del tipo ed alla disposizione spaziale di tali gradi di libertà si può ottenere una classificazione basata sulla forma dello spazio di lavoro raggiungibile dalla macchina.
Nella prassi comune qualsiasi tipo di classificazione sottintende che l'argomento trattato riguardi i cosiddetti "Robot seriali" o "manipolatori seriali". L'aggettivo "seriali" indica la disposizione consecutiva dei vari elementi strutturali che compongono la macchina, elementi connessi fra loro da giunti che rendono possibili i vari movimenti.

Figura 1-1
In figura 1-1 è riportato lo schema di un tipico Robot basato sull'architettura seriale. In particolare si tratta di un manipolatore comunemente indicato come "antropomorfo", poiché la sua struttura cinematica ricalca le possibilità di movimento del braccio umano.
E' evidente la sequenza giunto - elemento strutturale - giunto - elemento strutturale caratterizzante tutta la catena cinematica che risulta aperta, cioè senza la possibilità di seguire percorsi chiusi percorrendo idealmente la successione degli elementi che la compongono.
In tempi recenti l'interesse della Robotica si è rivolto ad un nuovo tipo di macchina, caratterizzato da una struttura profondamente diversa rispetto a quella citata. La differenza sostanziale è rappresentata dal fatto che la struttura della macchina è costituita da una catena cinematica chiusa, ciò significa che percorrendo idealmente una qualsiasi sequenza di elementi contigui, si ottiene sempre un percorso chiuso.
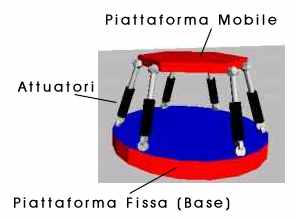
Figura 1-2
La figura 1-2 presenta un classico tipo di macchina caratterizzata da una cinematica cosiddetta "parallela". E' facile osservare come ciascun attuatore sia connesso direttamente con gli elementi estremi della catena cinematica, nel caso in esame la piattaforma mobile e la piattaforma fissa indicati in figura.Il collegamento degli attuatori con le piattaforme avviene tramite giunti sferici e giunti universali.
La figura 1-2 illustra una macchina dotata di sei gradi di libertà, il posizionamento della piattaforma mobile si ottiene agendo sulla lunghezza dei sei attuatori. Lo spazio di lavoro è tridimensionale, tale scelta non è casuale ed introduce l'argomento trattato in questo lavoro. Si tenga comunque ben presente che esiste una varietà notevole di possibili applicazioni dell'architettura parallela, ad esempio per macchine con un ridotto numero di gradi di libertà o con uno spazio di lavoro caratterizzato da un numero di dimensioni inferiore a tre.
![]()
![]()
![]()