Si definisce
stabilitŕ longitudinale quella relativa ai movimenti di
cabrata (muso in su) e di picchiata (muso in giů), cioč alle rotazioni
che avvengono intorno all'asse di beccheggio passante per il centro di
gravitŕ, perpendicolare alla direzione della velocitŕ e disposto
parallelamente al piano alare.
La stabilitŕ
longitudinale č assicurata quando il sistema di forze e dei momenti
agenti sul piano verticale passanti per il centro di gravita (C.G.) č in
equilibrio e perciň non si determinano rotazioni intorno all'asse 'Y' o
asse di beccheggio.
Lo schema delle forze č
rappresentato nella figura sotto (Fig.1). |
|
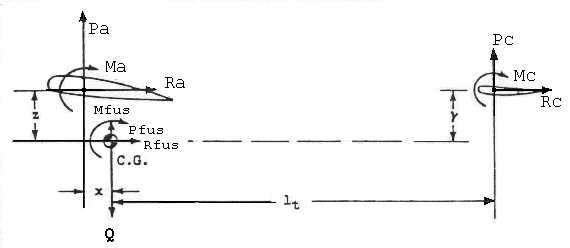 Fig.1
Fig.1
|
|
Come si vede dalla figura
sopra, il sistema delle forze e dei momenti č in realtŕ composto da tre
sottoinsiemi che corrispondono rispettivamente: all'ala, alla coda, alla
fusoliera. In particolare su ciascuno di essi abbiamo:
-
ALA : portanza,
resistenza, momento aerodinamico
-
CODA : portanza,
resistenza, momento aerodinamico
-
FUSOLIERA :
portanza,resistenza,momento aerodinamico
La spinta dei motori non
viene analizzata per non complicare l'equazione di equilibrio, vengono
anche trascurati perché ininfluenti, il momento aerodinamico di coda e la
resistenza di coda. Ai
fini dell'equilibrio sull'asse di beccheggio, il peso dell'aereo come la
portanza e la resistenza di fusoliera, non determinano movimenti di
rotazione perché per definizione tali forze agiscono sul centro di
gravitŕ e pertanto non entrano nell'equazione di equilibrio. Vediamo
adesso come si sviluppa tale formula considerando questi fattori : |
| Mcg = (Pa * X) + (Ra * Z) + Ma
+ Mfus - ( Pc * Lt) = 0 |
|
Come si vede dalla formula per avere l'equilibrio
intorno all'asse di beccheggio bisogna che la somma dei momenti sul piano
verticale sia uguale a zero.
Ci possono essere tre
casi come risultato dell'equazione:
- Pc > 0 , cioč la coda č portante e il
velivolo č detto pesante di coda. Evidentemente perché possa essere
soddisfatta l'equazione di equilibrio č necessario che il baricentro
si trovi dietro il centro di pressione dell'ala.
- Pc = 0 , coda neutra, č il caso ideale, in
esso il baricentro del velivolo si trova in corrispondenza del centro
di pressione dell'ala, cioč P(ortanza) e Q(peso) sono direttamente
uguali e opposti.
- Pc < 0 , coda deportante, il velivolo č
detto pesante di naso. Il baricentro si trova avanti al centro di
pressione, contemporaneamente l'ala deve sviluppare una portanza
superiore al peso e quindi si ha una resistenza indotta maggiore.
Tutte e tre le condizioni, stabilizzatore
portante, neutro, deportante, possono verificarsi su un velivolo al
variare delle condizioni di volo. Per una determinata incidenza perň se
ne verifica una sola, quindi si dovranno prendere in considerazione per
uno studio reale i vari regimi di volo possibili. Ora
analizzeremo graficamente il comportamento di un velivolo nel quale il
C.G. (centro di gravitŕ=peso) sia spostato in avanti rispetto al C.P.
(centro di portanza) (Fig.2). |
|
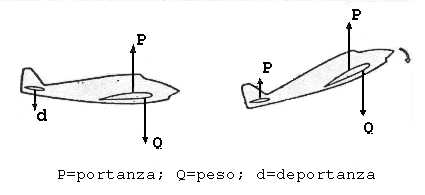 Fig.2
Fig.2
|
|
Con questa disposizione
di forze si determina una coppia picchiante che induce il velivolo a
mettere il muso giu. Per avere l'equilibrio basta disporre lo
stabilizzatore calettato con una incidenza minore negativa rispetto a
quella dell'ala. il che crea una forza deportante in coda diretta verso il
basso che determina un momento cabrante che equilibra il momento
picchiante.
Nella realtŕ del volo
orizzontale, si determinano delle oscillazioni verso l'alto e verso il
basso che si smorzano rapidamente, riportando il velivolo nel
primitivo assetto di equilibrio orizzontale. |
|