![]()
![]()
![]()
Applicazioni della piattaforma di
Gough-Stewart
L'applicazione nell'ambito delle simulazioni di volo fu la prima ad attrarre l'attenzione dei ricercatori verso i Robot a cinematica parallela.
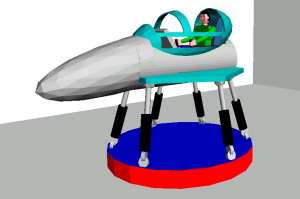
Figura 1-3
In figura 1-3 è schematicamente visualizzato l'impiego della piattaforma di Stewart come mezzo di movimentazione di una sezione d'aereo. Questa soluzione permette di riprodurre in modo molto realistico le condizioni di funzionamento di un velivolo, limitando però i costi e soprattutto i rischi, ad esempio, delle fasi iniziali di addestramento al pilotaggio. Da un'analisi anche superficiale di questa applicazione traspare immediatamente l'attitudine della piattaforma di Stewart a movimentare carichi di una certa entità. Tale caratteristica può essere messa in relazione al fatto che il peso del carico movimentato, anche se in modo non uniforme, si ripartisce contemporaneamente su tutti gli attuatori.
Per lungo tempo piattaforma di Stewart e simulatore di volo sono stati considerati praticamente sinonimi. Negli ultimi anni è però cresciuto l'interesse verso le macchine basate sulla piattaforma di Stewart, ed in generale sulla cinematica parallela, anche per applicazioni tipo macchina utensile.
Una semplice analisi permette di capire i motivi di questa evoluzione storica. Se si considera la piattaforma di Stewart si può facilmente osservare che, volendo far eseguire alla piattaforma mobile un qualsiasi movimento, è necessario comandare tutti e sei gli attuatori contemporaneamente. Ciò necessita di una elevata velocità e capacità di calcolo da parte dell'unità di governo della macchina. Si può poi riscontrare che lo spazio di lavoro della macchina non è particolarmente esteso, in particolare il rapporto spazio di lavoro/volume della macchina è abbastanza sfavorevole, senza contare che all'interno di tale spazio di lavoro possono presentarsi configurazioni singolari in cui si può perdere la controllabilità del sistema.
Ecco allora giustificato l'impiego per la simulazione di volo, in cui si richiedono spostamenti non eccessivamente ampi di carichi notevoli, il tutto controllato da calcolatori elettronici dedicati in grado di gestire in tempo reale tutte le operazioni.
Con lo sviluppo dei calcolatori elettronici è però caduto il vincolo sulla difficoltà di controllo, aprendo nuove prospettive d'impiego per le macchine a cinematica parallela. Il limitato spazio di lavoro (almeno per la piattaforma di Stewart) non permette di delinearne un impiego dedicato alla manipolazione e spostamento di oggetti, ma la grande capacità di carico, l'elevata rigidezza dovuta alla struttura chiusa della macchina, l'elevata precisione, ripetibilità e capacità di accelerazione ne fanno presumere un'ottima possibilità d'impiego nel campo, ad esempio, delle macchine utensili ad asportazione di truciolo.
Esistono esempi di macchine a cinematica parallela dedicate ad impieghi tradizionalmente affidati alle fresatrici, ma anche applicazioni relative ad operazioni di montaggio con interferenza di parti meccaniche che ne sfruttano le buone capacità di carico.
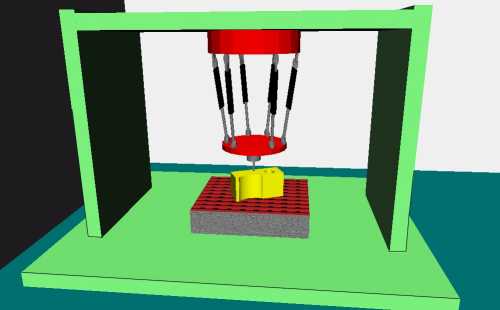
Figura 1-4
In figura 1-4 è rappresentato lo schema di una possibile applicazione della piattaforma di Stewart per operazioni di fresatura. In questo caso si apprezzano le ottime caratteristiche di precisione e ripetibilità.
Volendo allargare il panorama delle possibili applicazioni nel campo delle macchine utensili, è possibile ipotizzare l'impiego delle macchine a cinematica parallela all'interno di centri di lavoro del tipo schematizzato in figura 1-5.
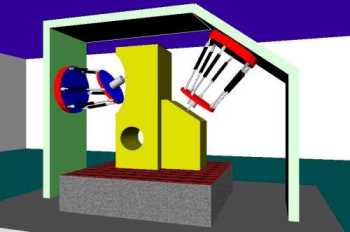
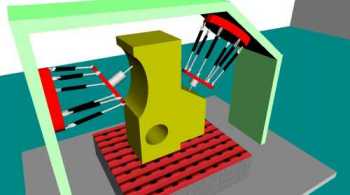
Figura 1-5
Quest'ultima applicazione ricalca quanto già praticato con le macchine ad architettura tradizionale, nell'ambito della realizzazione dei Centri di Lavorazione Flessibili (FMS Flexible Manufacturing System).
![]()
![]()
![]()