|
|
|
|
|
 |
Sorry, english translation
is in progress. Come back soon!
Alternately try free on-line automatic translation tools (like Google language tools) for a computer-generated translation from italian |
Tutti i segreti di un componente "misterioso"
Potenziometri "digitali" | Schema elettrico | Montaggio | Rilevamento | LED rotanti | LED a barra | LED a sequenza
I dispositivi più moderni utilizzano gli encoder sempre più spesso. I vecchi potenziometri e commutatori vengono via via rimpiazzati da questi dispositivi digitali, semplici e misteriosi al tempi stesso. La funzione di un encoder è semplice: convertire in impulsi digitali la rotazione di un albero. L'albero in questione può essere molto differente da un'applicazione all'altra....
pur se con dimensioni, caratteristiche elettriche, robustezza meccanica, velocità e precisione differenti, ruotando il perno degli encoder incrementali otteniamo sempre la medesima sequenza di impulsi. Esternamente gli encoder si presentano come un blocchetto plastico o metallico. Da una delle pareti fuoriesce un perno, da un'altra invece tre piedini. Uno di questi piedini è il comune, dagli altri due invece fuoriescono gli impulsi quando si ruota il perno. Prenderemo in considerazione i tipi più economici di encoder, quelli in cui i contatti sono costituiti da semplici interruttori (sulle macchine automatiche si montano invece spesso gli encoder di tipo ottico, dove gli interruttori sono stati sostituiti da delle coppie di led e fototransistor). Il modello utilizzato nei nostri esperimenti è di produzione ALPS, e produce 24 impulsi per giro, ad ogni impulso si avverte uno "scatto" sul perno. Si utilizza in prodotti di largo consumo (con 24 scatti è l'ideale per gli orologi!), ed in commercio se ne possono trovare di simili a 36 ed anche 48 impulsi per giro. Se avete la fortuna di possedere un encoder del tipo usato nelle macchine automatiche, noterete che questi hanno un movimento continuo. Questi encoder sono quasi sempre ottici (in un modo simile ad un mouse), ed hanno una risoluzione di 256 impulsi per giro ed anche più. Troverete allora dei piedini supplementari che servono ad alimentare l'elettronica interna. Chi possiede questi encoder sa anche come collegarli quindi non ci dilungheremo oltre. In questo esperimento vedremo:
|
|
|
||||||||||||
Gli encoder meccanici sono del tutto simili ad una coppia di contatti. E' come se dentro ad ogni encoder ci fossero due pulsanti (A e B) che si pigiano con una sequenza prestabilita ogni volta che ne ruotiamo l'alberino. I pulsanti si collegano direttamente fra gli ingressi del NUTCHIP e GND: collegheremo quindi A all'ingresso 1, B all'ingresso 2, ed il terminale comune (COM) al negativo (GND).
 |
|
Schema elettrico di base per sperimentare con un encoder |
Alle uscite colleghiamo 4 LED, ponendo in serie ad ognuno una resistenza per limitare la corrente massima.
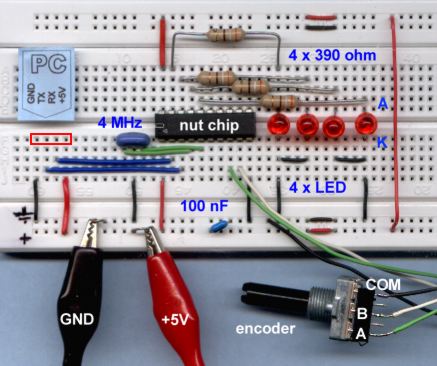 |
Componenti usati: 4 x resistenze da 390 ohm |
La fotografia mostra come montare il circuito sulla basetta sperimentale.Fate attenzione a non dimenticare nessuno dei numerosi ponticelli di filo presenti. Il katodo (K) dei LED è quello dalla parte smussata della capsula, e corrisponde anche al terminale più corto.
| Potete saldare degli spezzoni di filo ai piedini dell'encoder, oppure potete costrurvi un zoccolo speciale tagliando un pezzo di un comune zoccolo per integrati. Il passo fra un piedino e l'altro dell'encoder (5,08 mm) infatti è esattamente il doppio del passo degli integrati (2,54 mm). |  |
Rilevare il movimento di un encoder è facile: basta attendere che si chiudano i suoi contatti.Dal tipo di sequenza che si presenta si deduce poi il senso di rotazione della manopola. Nel nostro schema, A è collegato all'ingresso IN1 e B ad IN2. Quando il contatto è aperto, il relativo ingresso è a 1; quando il contatto si chiude sull'ingresso si leggerà invece uno 0.
|
movimento ORARIO
|
movimento ANTIORARIO
|
||
| posizione di riposo |
IN1 = 1, IN2 = 1
|
posizione di riposo |
IN1 = 1, IN2 = 1
|
| inizio movimento orario (A) |
IN1 = 0, IN2 = 1
|
inizio movimento orario (B) |
IN1 = 1, IN2 = 0
|
| metà movimento (A+B) |
IN1 = 0, IN2 = 0
|
metà movimento (A+B) |
IN1 = 0, IN2 = 0
|
| fine movimento orario (B) |
IN1 = 1, IN2 = 0
|
fine movimento orario (A) |
IN1 = 0, IN2 = 1
|
La tabella del Nutchip collegherà uno stato all'altro tenendo traccia di queste fasi. La chiusura di entrambi i contatti indicherà il momento di partire: ci porteremo in uno stato intermedio, attendendo che la riapertura di uno dei due ci indichi il verso di rotazione. Potremo quindi portarci definitivamente nello stato successivo, dove potremo eventualmente attendere che si riaprano entrambi i contatti (se temiamo che il nostro encoder abbia dei rimbalzi).
Il primo esperimento è quello di realizzare delle semplici luci rotanti. Girando l'encoder, il LED acceso si muoverà da destra a sisnistra o da sinistra a destra. Questo tipo di funzionamento è analogo a quello di un SELETTORE a quattro vie. Quando si avanza oltre l'ultimo LED si riaccende il primo, e viceversa. Il file da caricare è encoder_rot.nut.
In questo esperimento i LED si accendono progressivamente. Questo tipo di visualizzazione
dà l'impressione di una grandezza che aumenta o diminuisce ed è
adatto per esempio ad un controllo di volume o di velocità di un motore.
A differenza del controllo precedente, quando si avanza dopo che anche l'ultimo
LED si è acceso, la sequenza non ricomincia da capo ma resta come congelata.
Il file da caricare è encoder_bar.nut
Negli esperimenti precedenti abbiamo disposto le uscite in modo da dare un'accensione
"ordinata" ai LED, uno dopo l'altro. In realtà possiamo scrivere
nelle uscite una qualsiasi altra sequenza: ad esempio, se usiamo dei LED rossi
, gialli e verdi (ed eventualmente un LED tverde a forma di freccia) possiamo
simulare la sequenza di un semaforo (solo rosso; verde+freccia; verde+giallo+freccia;
rosso+freccia...).
Un caso speciale di uscite in sequenza predefinita è dato dal contatore binario. Per un contatore binario, le uscite si attivano in una sequenza che rispecchia quella delle cifre dei numeri binari. Una tale sequenza si può usare per pilotare ad esempio un display.
I più esperti avranno già capito come farlo... Potete vederlo nel prossimo progetto, un display regolabile ad encoder.