Fig.1 Pendolo invertito
Il problema che si pone è il seguente:
Date gli n-spostamenti angolari teta e le n-velocità angolare dteta/dt,
calcolare il valore della corrente da applicare al motore del carrello( che poi
si traduce in una forza F) affinchè il pendolo rimanga sempre nella posizione
di instabilità teta= 0°
I dati di input sono , come già evidenziato,
l'angolo teta rispetto alla
verticale compreso tra -90° e +90° la
velocità angolare del pendolo compresa tra -90 rad/sec e +90rad/sec; mentre
l'output da calcolare è la corrente I (da applicare al motorino)compresa tra
-18 mA e + 18 mA, per garantire
l'equilibrio instabile del pendolo. Come abbiamo già ricordato i sistemi
a logica fuzzy calcolano con le parole. Infatti le funzioni membership degli
input e dell'output sono rappresentate nelle figure seguenti ed identificano
l'intero stato del modello attraverso degli aggettivi!
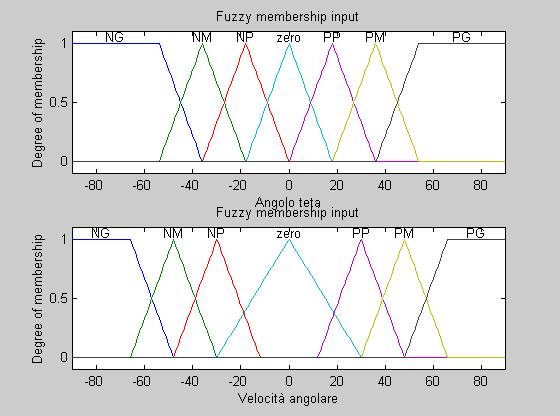
Funzioni membership in input
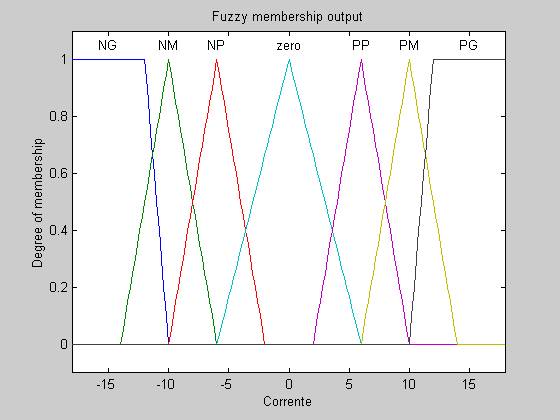
Funzione membership in output
Sia gli input che gli output sono
rappresentate da funzioni membership molto semplici, triangolari e trapezoidali.
Le relative sigle stanno a significare che parto dall'avere termini
negativi(grandi-medi
e piccoli) e poi positivi(piccoli-medi e grandi).
A questo punto si va avanti con
l'aiuto delle regole empiriche sostenute da un esperto del particolare problema.
Così ad esempio se" l'angolo teta è NG and la velocità angolare è zero
allora la corrente deve essere PG"; e cosi via fino a formare tutte le
regole possibili.
Avanti

